You can not select more than 25 topics
Topics must start with a letter or number, can include dashes ('-') and can be up to 35 characters long.
2.1 KiB
2.1 KiB
sophon bm1684x 算法耗时测试报告
1.测试对象
公司算能计算板卡,采用一个过遮挡的对地车辆视频进行跟踪+识别测试。

目标识别程序: 采用算能FP16精度模型,模型分辨率1280*1024
目标传统跟踪算法: 采用跟踪基线(初始化为对地场景),KCF开3尺度,TLD抗遮挡模块开(OPENMP未开启)。
2.测试方法与结果
在算能板运行测试程序,并将识别、跟踪结果绘制在双路视频上,为了测试方便,双路均使用了相同的注入视频(视频规格1080p)。
为贴近实际产品,已有图像采集线程运行中。
2.1 用例1
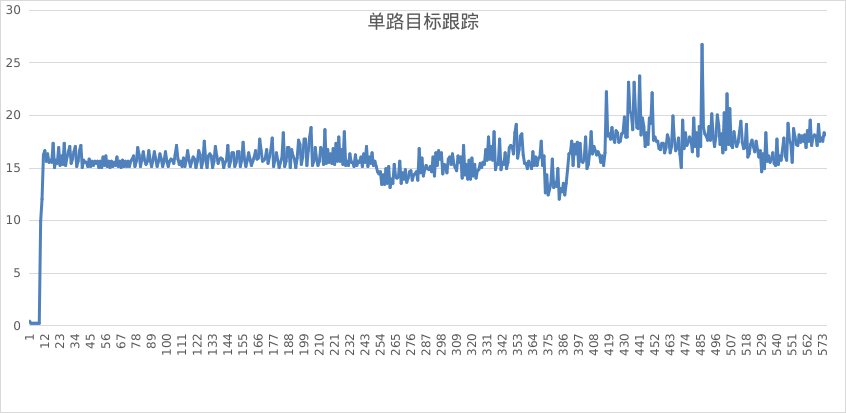
单路传统跟踪
仅运行单路传统算法跟踪程序时,单帧处理算法耗时如下,目标后半段过遮挡后有较大波动,其余大约在15ms左右。
2.2 用例2
单路目标识别+单路目标传统跟踪
目标识别接口自身可异步调用,因此直接同时运行即可。
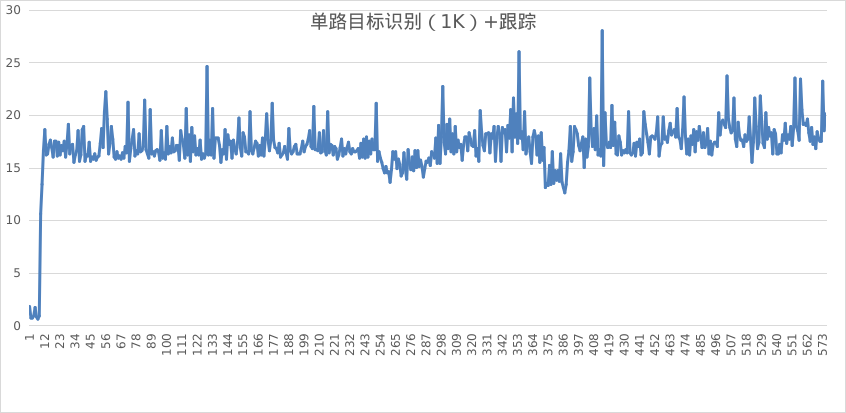 同时运行目标识别+目标跟踪算法后,平均耗时提升到18ms,已较难满足50Hz,需要进一步优化程序。
过遮挡时,整体波动更为明显。
同时运行目标识别+目标跟踪算法后,平均耗时提升到18ms,已较难满足50Hz,需要进一步优化程序。
过遮挡时,整体波动更为明显。
2.3 用例3
按照双路目标识别+双路目标传统跟踪
双路目标跟踪采用线程并行
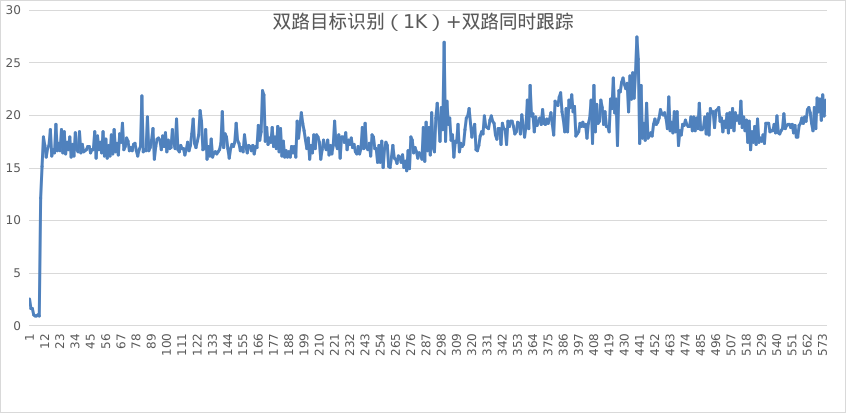
双路同时识别+跟踪与单路差异不大。双路识别跟踪效果如下:

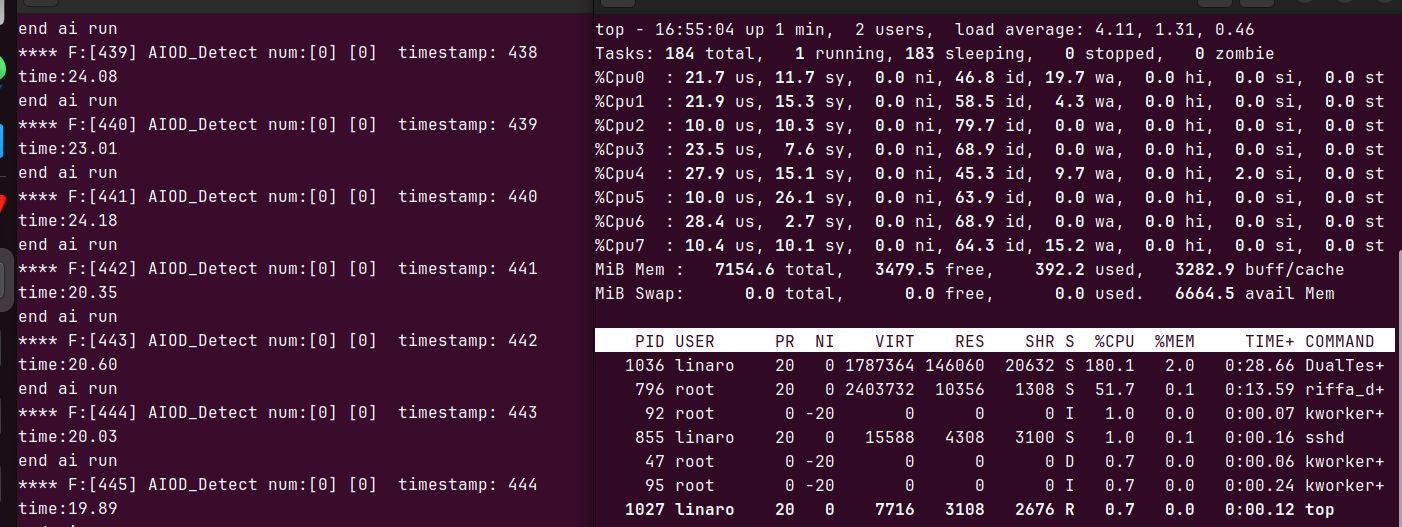
此时的CPU占用如下:
3.结果说明
算能板在2.3G主频下算力较为可观,能够基本满足50Hz对地需要,且双路跟踪与单路的耗时差异不大。 整体上还需要进行一些针对性的优化将稳态耗时降低到15ms附近才能保证跟踪稳定。
对空算法整体资源消耗明显低于对地跟踪算法,且搜索与跟踪容易并行,可以充分利用多核优势,这里不再进行测试。
4.其他问题
目前的算能板功耗和散热需要优化,双路跟踪仅需运行几分钟后,主频即减半,耗时提升一倍。